
Wind is a clean energy source that is all around us. But how do you design a portable walking machine that can capture this invisible energy? I worked with fellow mechanical engineers Kenna Middleton and José Rodes to answer this question for our capstone design project.
The goal of our capstone design project was to create a walking machine that was only powered by the wind. We had less than three months to ideate through various designs and prototypes and formulate our final machine. This page outlines the engineering process we undertook to reach our final prototype.
The Client
One of our professors was assigned as the client for this project. We interviewed him a few times to gain insight about his user needs for the device and consulted him during various stages of the fabrication process to ensure his needs were being met. The most important user needs that we designed for are outlined below.

Ideation
Our group started the ideation process by having each member do individual research and design an initial device in CAD. We then shared our designs and discussed the aspects of each device that we liked and the aspects that could be improved, and used this to collaborate on a new design. This new design was then turned into the initial prototype. Testing the initial prototype showed us what aspects of the design worked in practice and what aspects only worked on paper. We continued ideating and cycling through prototypes until we reached our final design.

Engineering
This project was a complex engineering undertaking because it required designing multiple components that worked both individually and as a system. The two big engineering challenges we faced were designing a system that captures energy from the wind, and designing a system of legs that could both support the device and walk. The details of how we designed these systems is outlined below.
Turbine Design
Version 1
After researching the subject, we determined that a vertical axis wind turbine was the best solution for capturing energy from the wind. This type of turbine accepts wind from any direction so the device would be able to walk in any wind condition. Our first turbine design used a series of airfoil-shaped blades that generated centrifugal lift to drive the turbine. This design had high efficiency and a rapid rotational speed, but when we hooked it up to the leg system we discovered it had a fatal flaw: it didn't generate much torque.

The leg system required more torque to walk than the lift-based turbine could produce.
Version 2
The goal for our next turbine design was to generate enough torque to drive the legs. This meant abandoning the highly efficient lift-based turbine blades and using a drag-based system instead. The new turbine blades were "pushed" by the wind so they had a strong force behind them, and thus a stronger torque than before. This design was able to drive the leg system, but it required strong wind and its efficiency had room for improvement.

The drag-based turbine was able to drive the leg mechanism, but it was horribly inefficient.
Final Version
The goal for our last turbine design was to more efficiently generate more torque than the previous design. We made the blades "scoop-shaped" so they captured the wind more efficiently and increased the number of blades from four to five so more wind could be captured. We also changed the gear transmission from 2:1 to 20:1 to increase the produced torque by a factor of 10. In addition to that, we fixed the blades further away from the axis of rotation to increase the lever-arm and therefore further increase the torque. This final design was more efficient and generated significantly more torque at very low wind speeds, but it came at a tradeoff for rotational speed.
The final turbine produced the most torque and was able to smoothly drive the leg mechanism.
A comparison showing where we started and where we ended up with the turbine design can be seen below.

Further Improvement
If more time was allotted for this project, further engineering analysis would be done to design a turbine that both produced high torque and had a high rotational speed. This is a consideration because a higher rotational speed would allow the device to walk faster. Preliminary analysis suggests that this can be achieved by moving the blades closer to the axis of rotation or by switching back to lift-based blades. While the lift-based blades offer the fastest rotational speed, they might not be capable of producing enough torque to drive the legs. As a result, both design solutions would have to be tested to determine which is best.
Leg Design
After researching the subject, we determined that the Theo Jansen mechanism was the most elegant solution for a leg system. This mechanism, developed by the Dutch kinetic artist Theo Jansen, has similar properties to a wheel and axel. Both are driven by a single crankshaft and both keep the crankshaft at a constant height above the ground. This is ideal because it offers a simple way of converting the rotational energy of the turbine into rotational energy of the crankshaft, and it ensures the device won't experience any sudden bumps that could cause damage.
Version 1
Our initial leg design was 3D printed from ABS plastic and had the same proportions as the Theo Jansen mechanism. In order to reduce the weight of the legs, strategic holes were incorporated along the middle of each linkage. We also lubricated the joints to reduce the energy loss due to friction. In an effort to keep weight down, we decided to only use four legs. This decision proved to be problematic because it was unstable and resulted in uneven weight distribution between the legs. In short, the device couldn't even stand by itself let alone walk.

Using only four legs was not stable enough to support the weight of the device.
Version 2
The goal for our next leg design was to increase stability and weight distribution. Our solution was to add four stationary legs to the device that would carry the bulk of the weight. While the device was supported by these stationary legs, the other four moving legs would then allow the machine to crawl forward. This solution ended up working but it wasn't elegant and wasn't truly walking.

The device could crawl but it was not quite walking yet.
Final Version
We knew a redesign was necessary to go from crawling to walking. The new design had to be lighter, more stable, have even weight distribution, and lose less energy due to friction. The stability issue was solved by designing the legs from pyramids instead of triangles. The triangles were only stable in two dimensions whereas the pyramids were stable in all three dimensions. We also changed the material from heavy ABS plastic to lighter balsa wood I-beams. This reduced the weight while maintaining structural rigidity. Our solution for better weight distribution was to increase the number of legs from four to twelve. This allowed each leg to support a smaller load and, because multiple feet were on the ground at all times, each leg was exposed to a uniform force. Finally, the energy loss was greatly reduced by replacing the cantilever-hinge joints with folding card-stock joints. The new joints were simply made from pieces of card-stock that were able to fold and unfold. This action required a negligent amount of energy and, because there weren't any sliding parts, there was no friction.

The final leg system was lighter and more stable, and allowed the device to truly walk.
A comparison showing where we started and where we ended up with the leg design can be seen below.

Further Improvement
If more time was allotted for this project, the leg design would be further refined. The area that can most be improved has to do with the contact between the legs and the floor. When our final prototype walks, it slowly rotates in the direction that the turbine rotates due to there not being enough friction between the feet and the ground to counter the turbine's momentum. In order to fix this we would add additional legs so more points of contact are on the ground at all times, and we would experiment with the cycling order of the legs. The final prototype cycles the legs so the outer most legs hit first, then the middle legs, and finally the inner legs. The prototype rotates in place when the inner legs make contact because of their small lever-arm, so changing the sequence should help remedy this issue.
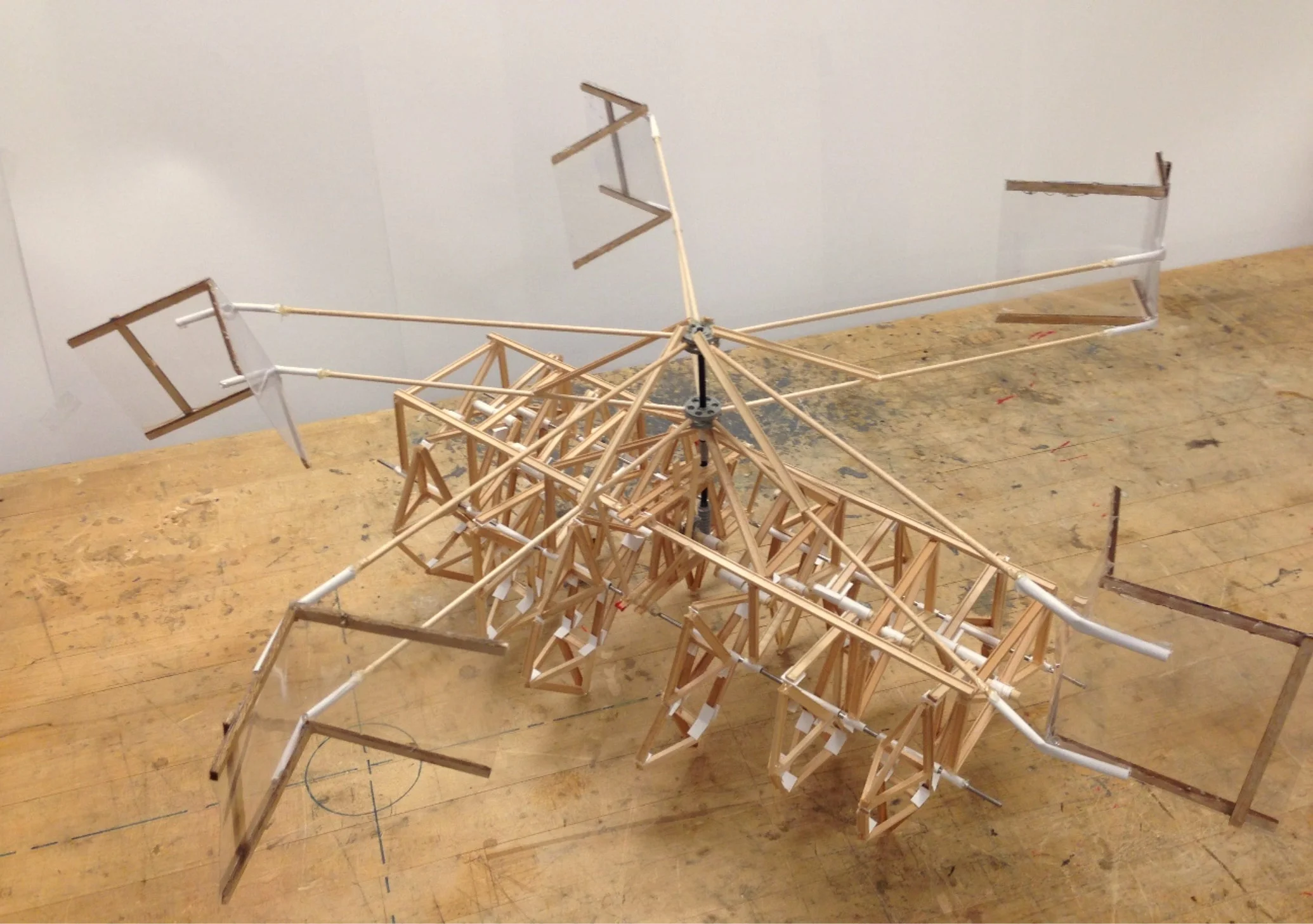
Final Prototype




Published Report
Our team's final report documenting the project is published through Washington University's Open Scholarship program and can be viewed at http://openscholarship.wustl.edu/mems411/6/. Please check it out if you want a more in-depth look at the engineering process and calculations we performed for this project.